I am pleased to invite you to participate in Prof. Jovana Jovanova’s upcoming 4-day course on Programmable Structures, Metamaterials, Smart Materials, and Soft Robotics.
Prof. Jovanova is from Delft University of Technology in the Netherlands, and is an expert in the field of engineering design, with a particular focus on programmable structures. During this 4-day course, you will have the opportunity to learn from her extensive experience and gain insight into the latest developments and trends in this field.
The course will consist of lectures, discussions, and hands-on activities, and will cover a range of topics, including:
Introduction to programmable structures and metamaterials: formulation, properties, fabrication techniques, and potential applications.
Design, modeling and fabrication of smart materials: piezoelectric materials, hydrogels, shape-memory alloys and polymers.
Soft robotics and their applications: design principles, actuation mechanisms, and applications in agriculture, offshore and maritime industry.
Integration of smart metamaterials in soft robotics: integration of smart architected materials in soft robotics to create advanced devices and systems.
The course will be offered in English, is free for all, and will be held at Unicamp’s School of Mechanical Engineering (FEM/Unicamp) on:
Wednesday, April 12, 9am-12pm
Friday, April 14, 9am-12pm
Monday, April 17, 2pm-5pm
Wednesday, April 19, 9am-12pm
This is a unique opportunity to learn from one of the leading experts in the field and to gain valuable skills that will help you advance in your career.
If you are interested in attending the course, please register by April 11 here: https://forms.gle/LscvhA8aM8bfsuMW8. If you have any questions about the course, do not hesitate to get in touch.
Best regards,
J. Labaki School of Mechanical Engineering University of Campinas, Brazil
Cientistas da USP e da Universidade da Pensilvânia construíram um drone autônomo que desvia de obstáculos e calcula quantidade de árvores em grandes vegetações
Drone autônomo é capaz de calcular a quantidade de árvores de uma floresta. Foto: Universidade da Pensilvânia
Obter informações detalhadas sobre uma floresta é fundamental para orientar o poder público a definir políticas de conservação e a monitorar possíveis crimes ambientais, como queimadas e desmatamentos ilegais. Atualmente, para fazer um levantamento sobre determinada área, especialistas produzem o chamado inventário florestal, estudo que apura o número estimado de árvores de uma floresta, o volume de madeira disponível, a área coberta por vegetação, as características da biodiversidade local, a topografia da região, entre outros dados.
No entanto, realizar esse trabalho manualmente é praticamente inviável tendo em vista a dificuldade de acesso a algumas matas e o longo tempo para execução das tarefas, que podem levar semanas para serem finalizadas, além de exporem os profissionais a diversos riscos, como quedas em buracos e ameaças de animais. Por esses motivos, pesquisadores brasileiros e norte-americanos desenvolveram um sistema computacional capaz de controlar um drone de forma autônoma (sem controle humano) no interior de florestas, permitindo que ele desvie de árvores e mapeie grandes territórios em poucos minutos.
“Além de termos a possibilidade de fazer um inventário florestal em uma área de cobertura muito maior, com a atuação do drone esse processo se torna muito mais rápido, seguro e preciso”, explica Guilherme Nardari, pesquisador do INCT de Sistemas Autônomos Cooperativos (InSAC), sediado na Escola de Engenharia de São Carlos (EESC) da USP, e um dos autores do trabalho, que foi realizado em parceria com cientistas da Universidade da Pensilvânia, nos EUA.
Vant mapeia grandes áreas florestais em minutos. Foto: Universidade da Pensilvânia
Para efeito de comparação, com o drone desenvolvido seria possível mapear uma floresta inteira de 400 mil metros quadrados em apenas 30 minutos. Já se o mesmo trabalho fosse realizado por uma equipe de engenheiros florestais, por exemplo, o tempo saltaria para 12 dias e meio, considerando que eles trabalhassem 24 horas por dia, missão impossível para um único grupo. Pela dificuldade da tarefa, os profissionais optam por avaliar pequenos trechos da floresta e fazer uma estimativa dos dados totais, gerando informações muito menos precisas e detalhadas.
Com peso aproximado de 3kg e autonomia de voo de 20 minutos, o drone, que está sendo testado nos EUA, é composto por quatro hélices, uma câmera, um computador de bordo, um controlador de voo e um sensor a laser, responsável por calcular em tempo real a distância entre o drone e as árvores ao seu redor. Pioneira, a utilização de um veículo aéreo não tripulado (Vant) autônomo para monitorar e mapear florestas possibilitará uma série de aplicações, como a elaboração de planos de manejo, atendimento a demandas de empresas florestais, definição de estratégias para preservar os recursos naturais da área e o combate ao desmatamento.
“Nós conseguiríamos avaliar o estado de conservação das florestas e detectar locais que precisam de reflorestamento, servindo de alerta para as autoridades ambientais caso alguma região apresente transformações suspeitas ao longo do tempo. Esse tema é muito relevante, principalmente pelo atual cenário que vivemos, de total descaso com a Amazônia”, afirma Roseli A. Francelin Romero, pesquisadora do InSAC e professora do Instituto de Ciências Matemáticas e de Computação (ICMC) da USP, em São Carlos. Segundo a docente, atualmente o Instituto Nacional de Pesquisas Espaciais (Inpe) realiza alguns levantamentos florestais por imagens de satélite, mas são estimativas que impossibilitam uma análise mais minuciosa da vegetação em áreas específicas.
Drone desenvolvido pelos cientistas poderá ser utilizado no combate a crimes ambientais. Foto: Pixabay
Segundo relatório divulgado no primeiro semestre deste ano pelo MapBiomas, 99% do desmatamento feito no Brasil em 2019 foi ilegal. Ao todo, mais de 1,2 milhão de hectares (ha) de mata nativa foram devastados, ou 12.187 km², o equivalente a oito municípios de São Paulo. Mais de 60% da área desmatada está na Amazônia, com 770 mil hectares derrubados. O segundo bioma em que mais houve perda foi o Cerrado, com 408,6 mil ha, seguido de Pantanal (16,5 mil ha), Caatinga (12,1 mil ha), Mata Atlântica (10,6 mil ha) e Pampa (642 ha). Já de acordo com pesquisa divulgada na última semana pelo Inpe, entre agosto de 2019 e julho de 2020 foram registrados mais de 45 mil alertas de desmatamento na Floresta Amazônica, um aumento de 34,5% em comparação com o período anterior.
Voando pelas florestas – Para evitar que o drone colida com algum objeto durante o voo, o sensor a laser do veículo aéreo dispara milhares de feixes de luz por segundo que, conforme acertam as árvores, calculam a distância delas para o Vant e estimam a espessura de cada tronco ou galho. Todos esses dados são interpretados por um código de computador (algoritmo) que foi desenvolvido e que utiliza inteligência artificial para detectar árvores, mapear a região e “guiar” o drone na direção correta, fazendo com ele se esquive dos obstáculos. Ao mesmo tempo, o algoritmo gera um mapa em 3D da floresta, revelando o número de árvores do local, o volume de madeira, a área coberta por vegetação, entre outros dados. Segundo os pesquisadores, o drone também é capaz de identificar folhagens no chão, permitindo avisar as autoridades sobre um risco maior de queimadas, que são muito comuns tanto no Brasil como nos EUA.
Drone cria mapa em 3D da floresta sobrevoada. Foto: Universidade da Pensilvânia
Para avaliar a eficácia do Vant autônomo, ele foi testado pelos cientistas em uma floresta de pinheiros norte-americana no Estado de Nova Jersey. Os resultados foram positivos: o drone conseguiu desviar das árvores e levantar com precisão os dados da área. Durante os trajetos, ele se comunicava em tempo real com operadores em solo, que formavam uma base móvel que recebia imagens da câmera do veículo aéreo, informações do voo, bem como do gasto de bateria. “Foi um desafio enorme do ponto de vista robótico, pois além de fazer um drone voar sozinho no meio das árvores, sem perdermos a comunicação com ele, precisávamos obter um mapa de qualidade, extremamente preciso”, conta Guilherme, que faz doutorado no ICMC e é orientado pela professora Roseli Romero.
Doutorando da USP, Guilherme realizou intercâmbio nos Estados Unidos. Foto: Guilherme Nardari/Arquivo pessoal
O pesquisador, que desenvolveu o trabalho durante intercâmbio nos EUA e recebe financiamento da Fundação de Amparo à Pesquisa do Estado de São Paulo (FAPESP), afirma que o algoritmo desenvolvido para controlar o drone permite um mapeamento mais preciso e com informações mais detalhadas sobre a floresta, além de voos menos suscetíveis a interferências em comparação com outros modelos encontrados na literatura da área. Os resultados do trabalho geraram um artigo que foi publicado na IEEE Robotics and Automation Letters, revista científica internacional. A pesquisa também foi apresentada na International Conference on Robotics and Automation (ICRA) 2020, um dos mais renomados eventos científicos da área de robótica do mundo, que teve início no dia 31 de maio e segue até o próximo dia 31 de agosto, com realização 100% online devido à pandemia de Covid-19.
Nos Estados Unidos, os cientistas parceiros no estudo criaram uma empresa e já começaram a oferecer alguns serviços de mapeamento com o drone para a iniciativa privada. Segundo Guilherme, há interesse em trazer a tecnologia para Brasil, mas antes o sistema de controle do Vant precisaria passar por algumas adaptações, afinal, existem diferentes tipos de florestas no país, com obstáculos distintos, que podem dificultar as missões com o veículo aéreo. A estimativa de custo para cada drone autônomo como esse é de R$ 60.000,00. “O valor não é alto se comparado ao retorno que ele pode trazer para a população em geral, com a preservação das florestas e do meio ambiente”, finaliza Roseli.
Texto: Henrique Fontes – Assessoria de Comunicação do InSAC
Contato para esta pauta Assessoria de Comunicação do InSAC E-mail: comunica.insac@usp.br Telefone: (16) 9 9727-2257 – Henrique Fontes
Drones autônomos podem ser utilizados na agricultura de precisão. Foto: Pixabay
Com o avanço da tecnologia, os robôs têm ganhado cada vez mais espaço na sociedade. Aplicações em segurança, transporte, agricultura, saúde e educação são algumas das frentes nas quais essas máquinas são capazes de atuar. No entanto, os desafios que elas enfrentam também se tornaram mais complexos com o passar dos anos, e um único robô não estava mais conseguindo atender a todo tipo de demanda. Isso movimentou o universo científico, fazendo com que os pesquisadores encontrassem meios para permitir que os robôs trabalhem em equipe (robótica cooperativa), buscando assegurar que as tarefas sejam cumpridas com sucesso.
Porém, para controlar e monitorar diversos robôs ao mesmo tempo, são necessários sistemas inteligentes e robustos que diminuam os riscos de ocorrerem falhas que possam gerar algum acidente. A questão é que, além de serem caros, esses sistemas também são suscetíveis a problemas de comunicação, já que carregam um elevado número de dados e informações, podendo ficar sobrecarregados.
Uma solução que promete contribuir para melhorar esse cenário é o algoritmo (sequência de comandos passada ao computador a fim de definir uma tarefa) desenvolvido por Kaio Rocha, doutorando do Programa de Pós-Graduação em Engenharia Elétrica da Escola de Engenharia de São Carlos (EESC) da USP. “Esse novo algoritmo exige menor poder computacional em relação a outras técnicas encontradas na literatura da área. Com isso, processadores mais simples podem ser utilizados, reduzindo o custo de implantação”, revela o cientista.
Robôs formam “times” para desempenhar tarefas mais complexas. Foto: Piqsels
Kaio explica que outra vantagem do seu algoritmo é que ele poderá reduzir as chances da comunicação entre robôs ser interrompida em uma eventual tarefa em conjunto: “Comparado com outras técnicas, nosso algoritmo requer menos tráfego de dados na rede, evitando sobrecargas, o que diminui as chances de ocorrência de atrasos de transmissão e perda de dados, ou ainda, de interrupção do sistema”, explica o pesquisador, que integra o Instituto Nacional de Ciência e Tecnologia para Sistemas Autônomos Cooperativos (InSAC), sediado na EESC.
A nova técnica computacional desenvolvida poderá ser eficaz, por exemplo, para controlar grupos de robôs que atuam no monitoramento de incêndios florestais; na comunicação entre veículos autônomos no contexto das cidades inteligentes (smart cities), reduzindo os riscos de acidentes; no gerenciamento de drones que praticam tarefas relacionadas à agricultura de precisão ou à segurança, realizando possíveis escoltas nas cidades, entre outros cenários.
Para testar seu algoritmo, Kaio está preparando um experimento com drones para que eles rastreiem um alvo terrestre móvel, que deverá ser um veículo autônomo. Durante a atividade prática, o pesquisador irá aproveitar para aplicar seu método em uma outra funcionalidade, que é a de manter os drones em “formação” enquanto monitoram o objeto no solo. A ideia é que os veículos aéreos atuem como se fossem um “bando de aves”, com movimentos totalmente sincronizados. Além de drones, a USP São Carlos conta atualmente com dois carros e um caminhão autônomo disponíveis para o desenvolvimento de pesquisas.
Kaio desenvolveu um algoritmo que poderá baratear os sistemas de controles de robôs. Foto: Henrique Fontes/InSAC
Os resultados obtidos com o algoritmo de Kaio geraram o artigo científico Robust Distributed Consensus-Based Filtering for Uncertain Systems over Sensor Networks, que foi apresentado durante o congresso mundial da Federação Internacional de Controle Automático (IFAC), realizado entre os dias 11 e 17 de julho, de forma virtual. O artigo está concorrendo ao prêmio IFAC Young Author Award, destinado a estudantes de doutorado com menos de 30 anos de idade.
Bolsista da Fundação de Amparo à Pesquisa do Estado de São Paulo (FAPESP), Kaio é orientado pelo professor Marco Henrique Terra, coordenador do InSAC e docente do Departamento de Engenharia Elétrica e de Computação (SEL) da EESC. A previsão é de que o aluno defenda seu doutorado no segundo semestre de 2021.
Confira, abaixo, o vídeo da apresentação de Kaio no IFAC World Congress 2020.
Texto: Henrique Fontes – Assessoria de Comunicação do InSAC
Mais Informações Assessoria de Comunicação do InSAC Telefone: (16) 9 9727-2257 E-mail: comunica.insac@usp.br
Sistema desenvolvido na USP analisou o comportamento de 200 abelhas contaminadas com o cerconil; em 10 dias, mais de 60% dos insetos haviam morrido
Abelhas também podem ser vítimas de fungicida. Foto: Pixabay
Um estudo realizado por pesquisadores da Escola de Engenharia de São Carlos (EESC) da USP, em parceria com cientistas da Universidade Federal de Viçosa (UFV), revelou que o cerconil, agrotóxico utilizado no Brasil para matar fungos, também pode ser letal para abelhas. O trabalho mostrou ainda que, mesmo aquelas que resistem inicialmente aos efeitos do produto químico, passam a se comportar como se estivessem mais velhas, indicando que não viverão por muito tempo.
Os resultados foram obtidos a partir do programa de computador desenvolvido por Jordão Natal durante seu mestrado na USP. O sistema analisou, durante 10 dias, o comportamento de 200 abelhas contaminadas com o fungicida, o qual é muito comum no combate a pragas de meloeiro e melancia. Elas foram colocadas junto a outras 800 abelhas saudáveis dentro de uma caixa cercada por vidros transparentes, onde câmeras registravam seus movimentos. Para diferenciar as abelhas saudáveis das contaminadas, uma marca com tinta foi feita nas costas das que ingeriram o agrotóxico. “Até o décimo dia, 65% das abelhas contaminadas haviam morrido. Já as que resistiram, tiveram seu comportamento alterado, aparentando estarem idosas, já que faziam atividades incompatíveis com a idade, como tarefas de limpeza e a procura por alimentos”, relata Natal, que teve sua pesquisa financiada pela Coordenação de Aperfeiçoamento de Pessoal de Nível Superior (CAPES). Vale ressaltar que as abelhas vivem, em média, 44 dias, ou seja, elas estariam morrendo antes de completarem um quarto de suas vidas.
Abelhas contaminadas foram monitoradas durante 10 dias por software desenvolvido na EESC. Na imagem à direita, pequenos pontos mostram como as polinizadoras são enxergadas pelo computador. Foto: Jordão Natal/Divulgação (Clique para ampliar)
Algo que ajudou o sistema a interpretar essa grande quantidade de dados ao final do período analisado foi a localização das abelhas contaminadas dentro da caixa. A posição das polinizadoras tende a revelar em que fase da vida elas estão, pois, conforme elas envelhecem, se aproximam das extremidades. “O software foi capaz de monitorar as ações de cada uma das abelhas, o que é uma tarefa é muito difícil, por serem animais de tamanho semelhante, que estão quase sempre em movimento e se cruzando rapidamente”, explica Carlos Maciel, pesquisador do Instituto Nacional de Ciência e Tecnologia para Sistemas Autônomos Cooperativos (InSAC) e orientador da pesquisa. Apesar do desafio, o programa, que levou cerca de 10 meses para ser desenvolvido e captura até 30 fotos por segundo, apresentou um índice de 99% de precisão.
Contaminadas com doses não letais de cerconil no apiário da UFV, as abelhas utilizadas no estudo são da espécie Apis mellífera, a mais comum do mundo. “O que mais nos chocou foi descobrir que um fungicida até então inofensivo para abelhas se mostrou mais tóxico que o imidaclopride, inseticida considerado o grande vilão dos cultivos agrícolas. Os dados são preocupantes”, afirma Eugênio de Oliveira, professor de entomologia da UFV. Apesar de ainda não haver um entendimento sobre o motivo de o fungicida ter levado as abelhas à morte, o docente suspeita que o produto pode estar anulando os efeitos de enzimas responsáveis pela desintoxicação desses insetos.
Figura ilustra trajetória percorrida pelas abelhas dentro da caixa. Foto: Jordão Natal/Divulgação
No trabalho, os pesquisadores também analisaram o comportamento de abelhas que ingeriram o imidaclopride. Derivado da nicotina, o produto normalmente é aplicado em pomares, plantações de arroz, algodão e batata e, embora seja proibido em diversos países, seu uso ainda é permitido no Brasil. O software da USP mostrou que aproximadamente 52% das abelhas contaminadas com o agroquímico estavam mortas no décimo dia.
“A extinção das abelhas é uma preocupação global, pois se trata de um problema que não afeta apenas o meio ambiente, mas também a economia. Elas participam de boa parte da polinização de nossos alimentos, alguns deles, inclusive, polinizados exclusivamente por elas”, alerta Maciel, que também é professor do Departamento de Engenharia Elétrica e de Computação (SEL) da EESC. Segundo o estudo realizado pela Plataforma Brasileira de Biodiversidade e Serviços Ecossistêmicos (BPBES), em parceria com a Rede Brasileira de Interações Planta-Polinizador (Rebipp), o valor do trabalho prestado pelos animais polinizadores à agricultura brasileira gira em torno de R$ 43 bilhões por ano. O levantamento considerou 67 cultivos, sendo que a soja, primeira colocada, responde por 60% do valor estimado, seguida pelo café (12%), laranja (5%) e maçã (4%).
Carlos Maciel (à esquerda) e Jordão Natal desenvolveram um sistema inédito para monitorar o comportamento de animais que atuam de forma coletiva. Foto: Henrique Fontes/SEL
Com a nova tecnologia criada na EESC, a qual já está pronta para ser utilizada no mercado, a missão de compreender o comportamento de animais que atuam de forma coletiva se tornou mais simples, pois toda interação entre esses organismos e o meio ambiente poderá ser “ensinada” para o computador em forma de algoritmos. “O que o sistema fez em semanas, nós levaríamos alguns anos para mensurar”, comemora Eugênio. Combinando técnicas de inteligência artificial e big data, o software desenvolvido conseguiu analisar dezenas de horas de vídeo, totalizando 700Gb de material. A partir de agora, os pesquisadores pretendem estudar o comportamento de abelhas contaminadas com outros tipos de agrotóxicos, a fim de ampliar o entendimento a respeito dos efeitos desses produtos químicos.
Texto: Henrique Fontes – Assessoria de Comunicação do InSAC
Mais Informações Assessoria de Comunicação do InSAC
Telefone: (16) 3373-8740
E-mail: comunica.sel@usp.br
Dirigível em desenvolvimento no InSAC deve passar por novos testes em breve. Foto: Samuel Bueno/InSAC
Contribuir para a realização de voos mais rápidos e com menor consumo energético. Esse é objetivo do estudo de Ely Carneiro de Paiva, pesquisador do Instituto Nacional de Ciência e Tecnologia para Sistemas Autônomos Cooperativos (InSAC). Durante seu pós-doutorado na Concordia University, do Canadá, o especialista desenvolveu um novo algoritmo que analisa as condições do vento de determinada região para indicar a melhor trajetória a ser percorrida por um dirigível autônomo.
A ideia, segundo o cientista, é que a técnica guie o dirigível a partir de dados obtidos por um sensor colocado em seu bico, o qual estima a direção e a velocidade do vento local. Além disso, o algoritmo utilizará informações recebidas a distância sobre as condições do vento no destino e em alguns pontos do percurso. “O maior desafio é obter e atualizar as informações do vento ao longo dos pontos por onde a aeronave irá percorrer. No entanto, se soubermos apenas quais são as condições de vento no início e no final do trajeto, já é possível obter uma redução de consumo de energia ou de tempo”, explica Ely, que escreveu três artigos sobre o trabalho nos últimos 12 meses.
O algoritmo desenvolvido também pode ser utilizado para guiar aviões. Apesar de já existirem modelos matemáticos que os ajudam a aproveitar o vento a seu favor, a economia energética geralmente considera que a velocidade das aeronaves é constante. Já com a solução proposta pelo especialista, os veículos aéreos poderão se beneficiar mesmo que utilizem velocidades variáveis durante certa trajetória, o que torna o percurso muito mais flexível e fácil de ser planejado. Além disso, por ser baseado em equações matemáticas simples, o método pode ser aplicado a aeronaves autônomas de pequeno porte, como drones, que não dispõem de um sistema com grande capacidade computacional. Ainda em fase de testes, o algoritmo foi utilizado em um simulador de voo, mas deve ser testado em breve no NOAMAY, dirigível autônomo que está sendo desenvolvido por pesquisadores do InSAC para monitoramento da Floresta Amazônica. Uma das inovações da aeronave fica por conta de seus quatro motores elétricos com hélices que são direcionáveis e giram 360°. Isso permite que o dirigível execute manobras de forma mais rápida, paire no ar e suba e pouse na vertical.
Ely escreveu três artigos científicos nos últimos 12 meses. Foto: Antônio Scarpinetti/Jornal da Unicamp
O NOAMAY realizou seu primeiro voo no ano passado, em Curitiba. Atualmente, está passando por uma readaptação para a retirada de excesso de peso da aeronave e, assim que estiver operacional, será levado para Manaus, sob a supervisão de Reginaldo Carvalho, professor da Universidade Federal do Amazonas (UFAM) e também cientista do InSAC. Posteriormente, testes-piloto estão previstos para serem realizados em Tefé, na reserva de Mamirauá, a 500 km de Manaus. Recentemente, o projeto do dirigível foi destaque em reportagens na imprensa, inclusive, aparecendo em rede nacional.
Escambo de conhecimento – Ao longo dos 15 meses em que realizou seu pós-doutorado no Canadá, Ely Paiva, que também é professor da Unicamp, foi convidado para ministrar uma série de palestras e participar de diversos eventos da área de veículos aéreos autônomos. “O projeto do dirigível desperta muito interesse nos pesquisadores por conta do contexto da Amazônia, fomentando debates sobre conservação ambiental e efeitos climáticos”, conta o docente. Ao todo, foram sete universidades visitadas pelo especialista, sendo que, em cinco delas, ministrou palestras para cientistas de vários países do mundo.
A experiência contribuiu para que ele aprendesse sobre a dinâmica das universidades e suas respectivas parcerias com o setor econômico. “Há um grande investimento tecnológico nas instituições em termos de laboratórios e equipamentos, principalmente com aportes governamentais”, afirma. Apenas para citar um exemplo, a ETS-École de Technologie Supérieure de Montreal, que conta com nove mil alunos de engenharia, possui sua própria fábrica de chips para utilização em seus projetos internos e para a prestação de serviços de extensão. O professor afirma ser natural que empresas procurem as universidades em busca de soluções para um problema ou mesmo pelo interesse na automatização de processos, visando ganhos de qualidade e rendimento. Outro ponto destacado pelo docente durante a experiência é a grande troca de conhecimentos entre diferentes universidades. Em uma das instituições visitadas, o professor conheceu um núcleo de pesquisa aeroespacial onde alunos dos cursos de engenharia elétrica, mecânica e civil atuam de maneira integrada.
Durante seu pós-doutorado no Canadá, Ely ministrou palestras para cientistas de várias partes do mundo. Foto: Ely Paiva/Arquivo Pessoal
Entre os eventos que o pesquisador do InSAC participou está a Aviation Innovations Conference: Cargo Airships, conferência de dirigíveis de transporte de carga realizada em Toronto, em março deste ano. Devido às condições inóspitas do norte gelado (Ártico) do Canadá, é grande o interesse em dirigíveis de carga como solução para os problemas logísticos em áreas remotas da região. Neste contexto, Ely ministrou a palestra “Autonomous Airships for Monitoring Applications in Amazon”, em que tratou sobre o dirigível que está sendo desenvolvido no InSAC: “Os dirigíveis são altamente adequados para aplicações ambientais e de biodiversidade, pois sua capacidade de pairar sobre no ar com grande estabilidade, baixo ruído e tempo prolongado, permite uma análise intensiva da fauna e da flora”, finaliza o especialista.
A conferência reuniu integrantes da academia, de órgãos governamentais e da indústria, incluindo a gigante americana Lockheed Martin, a maior empresa de defesa do mundo, que está produzindo o dirigível híbrido LMH-01, em fase final de homologação, e que promete trazer de volta a era de ouro dos antigos Zeppelins.
Projeto NOAMAY recebe apoio de diversas instituições. Foto: Divulgação
Texto: Assessoria de Comunicação do InSAC
Mais Informações Assessoria de Comunicação do InSAC
Telefone: (16) 3373-8740
E-mail: comunica.insac@usp.br
Alunos de escolas públicas recebem aulas de matemática na USP, em São Carlos
Quem nunca teve um sonho profissional? Aquele emprego pelo qual você faria de tudo para conseguir, enfrentando cada obstáculo. É natural que esse tipo de anseio comece a florescer na adolescência, período em que nossas mentes passam a vislumbrar o que será do futuro. No Centro de Inclusão Social (CIS) da USP em São Carlos, 11 jovens alunos de escolas públicas da cidade têm um motivo a mais para confiar que seus objetivos serão alcançados. Eles recebem bolsas de pré-iniciação científica como incentivo para que tenham aulas de matemática na Universidade.
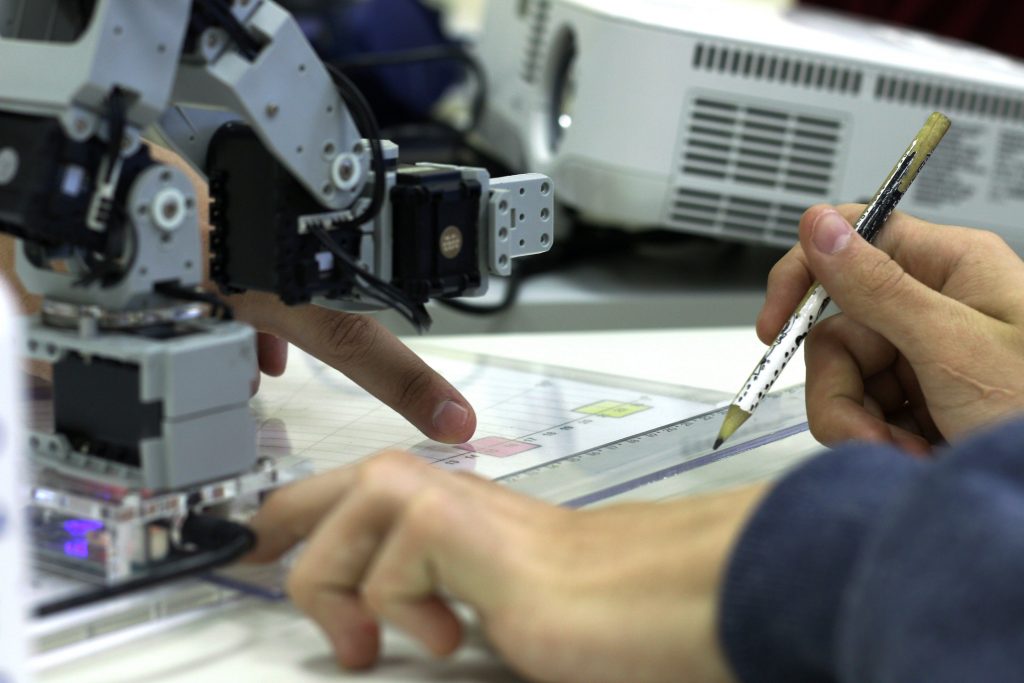
Com o intuito de facilitar o entendimento da disciplina, as aulas proporcionam aos estudantes um aprendizado interativo, com o auxílio de robôs. São drones, carrinhos, braços robóticos, bolinhas programáveis e diversos itens que ajudam a transmitir conteúdo por meio de uma metodologia muito mais atraente. “Nós já utilizamos os robôs para ensinar conceitos de função, ângulos, velocidade, gráficos e até gravidade”, conta Walter Bezerra Neto, monitor da turma e aluno do curso de Engenharia Elétrica da Escola de Engenharia de São Carlos (EESC).
Com o auxílio de robôs, jovens aprendem de forma interativa
Oferecidas pelo Instituto Nacional de Ciência e Tecnologia para Sistemas Autônomos Cooperativos (InSAC), sediado na USP, as bolsas de estudo são um instrumento de estímulo aos jovens para que eles fortaleçam seu conhecimento e se preparem para os desafios que se aproximam. “Utilizar a tecnologia para se aprofundar em tópicos matemáticos pode ser muito importante para que eles, por exemplo, se saiam bem no vestibular. Além disso, essa experiência contribui para que os adolescentes vislumbrem as carreiras que desejam seguir”, explica Marco Henrique Terra, coordenador do InSAC e professor do Departamento de Engenharia Elétrica e de Computação (SEL) da EESC.
Bolinha programável ilustra tópicos da matemática
Após alguns meses de atividades, o feedback obtido dos alunos tem sido extremamente positivo, segundo Walter. O monitor, que decidiu participar do projeto pelo interesse na área de ensino, revela que os jovens chegam até mesmo a pedir lista de exercícios para fazer em casa: “Isso mostra que realmente querem aprender”, afirma o futuro engenheiro, que se sente privilegiado em fazer parte da iniciativa: “É muito gratificante quando um aluno interage com o robô e diz que entendeu a matéria. Sem dúvida, é uma recompensa enorme saber que eles levarão na bagagem pelo menos uma parte do conhecimento que foi passado”.
Braços robóticos ensinam conceitos de ângulos aos estudantes
Escolhidos pela Diretoria Regional de Ensino de São Carlos para integrar o projeto, os 11 alunos que participam da iniciativa têm entre 14 e 16 anos e assistem às aulas todas as quartas-feiras, no período da tarde. Confira, abaixo, os depoimentos de Abel Correia, Daniel Henrique Lourenço e Lauanny Cristina Silva, todos participantes da atividade no Centro de Inclusão Social da USP.
Texto: Henrique Fontes – Assessoria de Comunicação do InSAC Fotos: Douglas Reginaldo Vídeo: Henrique Fontes e Douglas Reginaldo
Mais Informações Assessoria de Comunicação do InSAC Telefone: (16) 3373-8740 E-mail: comunica.insac@usp.br
Equipe da UFMG se classificou após vencer mais de 400 equipes do mundo e agora concorre a prêmio de US$1 milhão
Drones autônomos terão que realizar percursos no menor tempo possível em competição nos EUA. Foto: DRL/Divulgação
Um grupo de pesquisadores da Universidade Federal de Minas Gerais (UFMG) representará o Brasil na final da Artificial Intelligence Robotic Racing (AIRR), corrida inédita de drones autônomos que será realizada nos EUA a partir de julho. Depois de derrotar mais de 400 equipes de todo o mundo na fase classificatória da competição, o time mineiro está entre os nove finalistas do torneio, que irá pagar US$1 milhão ao primeiro colocado.
Os vencedores serão aqueles que programarem os drones para que eles completem os percursos no menor tempo possível, passando por uma sequência de “gates” – portais distribuídos em diversos pontos da arena onde as provas serão realizadas. “Representar o país nesta competição é motivo de muito orgulho e de grande responsabilidade. Somos o único time da América Latina classificado e iremos enfrentar desenvolvedores das melhores instituições de pesquisa em robótica do planeta”, diz Henrique Machado, aluno de mestrado da UFMG e bolsista do Instituto Nacional de Ciência e Tecnologia para Sistemas Autônomos Cooperativos (InSAC), sediado na USP, em São Carlos (SP).
Para chegar à final, os brasileiros passaram por uma etapa preliminar realizada virtualmente. Nesta fase, competidores de dezenas de países desenvolveram algoritmos para controlar a trajetória dos veículos aéreos não tripulados e testaram seus códigos em um simulador de drones criado pelo Massachusetts Institute of Technologies (MIT). O programa foi capaz de gerar no computador um ambiente semelhante ao que será encontrado na AIRR, e os nove algoritmos que obtiveram melhor desempenho foram selecionados por uma renomada banca de juízes da academia, governo e indústria, todos especialistas em sistemas autônomos e inteligência artificial.
Equipe da UFMG é a única da América Latina a participar da final da AIRR. Foto: XQuad/ Divulgação
Cada segundo de dedicação e esforço valeu a pena para que o time de Minas Gerais se classificasse para a final, mesmo que, para isso, algumas horas de lazer tivessem que ser comprometidas: “Passamos o carnaval inteiro programando”, revela Henrique. Agora, os brasileiros voltam suas atenções para o desafio presencial da competição, que foi dividida em cinco fases – elas estão previstas para ocorrer entre julho e novembro. Os finalistas não precisarão levar seus equipamentos até o local de prova, pois os organizadores irão disponibilizar uma robusta infraestrutura que contará com drones especialmente preparados para receber os algoritmos dos participantes. O estudante da UFMG estima que os códigos de sua equipe podem levar os veículos aéreos alcançarem até 120km/h.
“A corrida de drones é um esporte futurista e uma grande atração para os jovens desse milênio, bem como para alunos do ensino fundamental e médio com interesse em tecnologia”, afirma a organização do evento. A AIRR é promovida pela fabricante de produtos aeroespaciais Lockheed Martin em parceria com a Drone Racing League(DRL), liga profissional de corrida de drones pilotados por humanos que esse ano ocorrerá em agosto. Os vencedores das duas competições também se enfrentarão em uma grande disputa homem x máquina valendo U$$ 250 mil.
Batizada de XQuad, a equipe da UFMG é composta por pesquisadores de dois laboratórios da Universidade: o de Visão Computacional e Robótica (Verlab) e o de Sistemas de Computação e Robótica (CORO). Os integrantes do grupo estão em busca de apoio financeiro para arcar, principalmente, com despesas de passagens aéreas e hospedagem nos EUA. Para contribuir, basta acessar a campanha de crowdfunding na internet ou então entrar em contato pelo e-mail xquad.alpha@gmail.com. Veja, abaixo, o teaser oficial da AIRR.
Texto: Henrique Fontes – Assessoria de Comunicação do InSAC
Caminhão autônomo está sendo utilizado em pesquisas da USP São Carlos. Foto: Paulo Arias
Suponha que você trabalha como caminhoneiro e está subindo a serra para realizar uma entrega de rotina. De repente, ao reduzir a velocidade, sente o veículo pular, comum quando trocamos a marcha no momento errado. Além de ser um instante de desconforto para o motorista, esse simples deslize pode gerar um maior consumo de combustível. Se você tiver um caminhão comum, prestar mais atenção ao dirigir pode ser o bastante para evitar esse tipo de incidente, mas e se o mesmo veículo possuísse câmbio automático e fosse autônomo? Será que ele conseguiria atuar de forma precisa? Se depender de uma pesquisa em andamento da Escola de Engenharia de São Carlos (EESC) da USP, esse cenário de incerteza não será mais problema.
Autor do trabalho e doutorando do Programa de Pós-Graduação em Engenharia Elétrica da EESC, Lucas Barbosa explica que os freios e aceleradores de um caminhão sem motorista não “compreendem” a função dos câmbios automáticos, fator que dificulta o controle do veículo. Por isso que, por meio de técnicas matemáticas, o estudante está desenvolvendo um algoritmo para que os pedais do caminhão considerem a probabilidade de as marchas serem trocadas conforme sua velocidade aumenta ou diminui.
“Minha técnica ‘ensina’ aos freios e aceleradores como se comporta um câmbio automático. Com isso, além de o motorista ter uma viagem muito mais tranquila, o caminhão ainda economiza combustível, pois seu motor não será forçado de forma desnecessária”, diz o pesquisador. Até o momento, Lucas testou seu algoritmo em um caminhão autônomo real na área 2 do Campus da USP em São Carlos, percorrendo um pequeno trajeto. A expectativa é de que o estudo seja finalizado em até dois anos.
Lucas Barbosa pretende finalizar seu trabalho em dois anos. Foto: Henrique Fontes/InSAC
A pesquisa recebe a orientação do professor Marco Henrique Terra, coordenador do Instituto Nacional de Ciência e Tecnologia para Sistemas Autônomos Cooperativos (InSAC), sediado no Departamento de Engenharia Elétrica e de Computação (SEL) da EESC, onde ele é docente.
Texto: Assessoria de Comunicação do InSAC
Mais Informações
Assessoria de Comunicação do InSAC
Telefone: (16) 3373-8740
E-mail: comunica.insac@usp.br
João Roberto está desenvolvendo sua pesquisa na área de sistemas de controle. Foto: Henrique Fontes/InSAC
Um incêndio de grandes proporções toma conta de uma floresta próxima a uma área urbana. Por se tratar de uma local de difícil acesso, as autoridades de resgate acionam um grupo de drones autônomos para procurar possíveis vítimas no local, mas uma situação inesperada acontece: problemas na rede de comunicação impedem que os robôs aéreos conversem entre si, fazendo com que eles não cumpram o que foi programado. Apesar de o apreensivo cenário retratado ser hipotético, ele não é impossível de ocorrer, segundo os estudiosos da área de robótica coletiva. Por isso, uma pesquisa em andamento na Escola de Engenharia de São Carlos (EESC) da USP pretende contribuir para que missões como essa sejam realizadas com sucesso pelas máquinas.
O estudo é de João Roberto Benevides, doutorando do Programa de Pós-Graduação em Engenharia Elétrica da EESC. Segundo o pesquisador, quando há troca de informações entre um grupo de robôs, sejam eles aéreos ou terrestres, a rede de comunicação que os alimenta é passível de falhas, podendo gerar problemas como atrasos na transmissão de dados ou até mesmo quebra de sinal.
“Muitas vezes não consideramos a comunicação como um elemento que possa nos trazer prejuízo, mas sabemos que falhas irão acontecer. No entanto, para criarmos alternativas que auxiliem os robôs a lidarem com essas situações, precisamos entender como eles se comportariam em um cenário de adversidade”, explica o estudante, que recebe orientação do professor Marco Henrique Terra, coordenador do Instituto Nacional de Ciência e Tecnologia para Sistemas Autônomos Cooperativos (InSAC), sediado no Departamento de Engenharia Elétrica e de Computação (SEL) da EESC.
No trabalho, a ideia é desenvolver técnicas de controle capazes de preparar seis quadricópteros autônomos – um tipo de veículo aéreo não tripulado – para completar tarefas mesmo em caso de problemas nos serviços de comunicação. Durante as próximas fases da pesquisa, João Roberto fará novos testes em laboratório e em áreas externas a fim de validar os métodos propostos. A expectativa é de que os resultados sirvam de alicerce para que drones realizem missões nos mais diversos campos, como agricultura de precisão, entregas remotas, segurança, entre outros. Além do InSAC, o trabalho recebe o financiamento da Fundação de Amparo à Pesquisa do Estado de São Paulo (FAPESP). Confira no vídeo abaixo uma demonstração dos testes que estão sendo realizados na USP.
Texto – Assessoria de Comunicação do InSAC
Mais Informações Assessoria de Comunicação do InSAC Telefone: (16) 3373-8740 E-mail: comunica.insac@usp.br
Apesar de já estarem presentes em diversos segmentos da sociedade, os drones autônomos ainda possuem algumas aplicações inexploradas, como sua contribuição no combate a incêndios ou então em buscas por sobreviventes de desastres aéreos no interior de florestas, que são locais de difícil acesso. O elevado número de árvores e a frequente instabilidade do sinal de GPS nesse tipo de ambiente são fatores que dificultam a atuação dos veículos aéreos não tripulados, obrigando os cientistas a prepará-los para “driblar” esses obstáculos.
Para debater sobre os desafios dessa tarefa e possíveis soluções para o problema, o pesquisador Guilherme Pereira, do Instituto Nacional de Ciência e Tecnologia para Sistemas Autônomos Cooperativos (InSAC), ministrará, no dia 9 de maio, uma palestra no Departamento de Engenharia Elétrica e de Computação (SEL) da Escola de Engenharia de São Carlos (EESC) da USP. Aberto a todos os interessados, o bate-papo é gratuito e ocorrerá no Anfiteatro Armando Toshio Natsume do SEL, a partir das 13h50.
Sobre o palestrante: Guilherme Pereira é doutor em Ciência da Computação pela Universidade Federal de Minas Gerais (UFMG), onde atualmente é professor associado do Departamento de Engenharia Elétrica da Instituição. Ele também trabalha como professor associado no Departamento de Engenharia Mecânica e Aeroespacial da West Virginia University (WVU), nos EUA. Ainda na UFMG, o docente foi um dos fundadores do Grupo de Pesquisa e Desenvolvimento de Veículos Autônomos (PDVA) e coordenou o Laboratório de Sistemas de Computação e Robótica. Suas pesquisas são focadas no planejamento de movimento e localização de robôs móveis individuais ou em grupo.
Texto: Assessoria de Comunicação do InSAC
Foto: Pixabay
Mais informações Assessoria de Comunicação do InSAC
Telefone: (16) 3373-8740
E-mail: comunica.insac@usp.br