



P2. Sistemas Robóticos Leves
P2. Plataformas mais leves que o ar para sistemas de sensoriamento, comunicação e informação aplicadas à Região Amazônica
Governos, Academia e Indústria têm dispensado muita atenção nos últimos anos para os problemas relacionados com o planeta sustentável. Preservação ambiental, uso sustentável dos recursos naturais e gestão de risco de desastres ecológicos (sejam naturais ou não) são apenas alguns exemplos dentre outras questões quem têm chamado a atenção recentemente. Contudo, ações concretas não seguem o mesmo passo e paixão das discussões. O principal objetivo deste tópico é a realização das atividades de pesquisa, desenvolvimento e inovação necessárias para implantar sistemas computacionais baseado em plataformas aeronáuticas mais-leves-que-o-ar para a proteção e preservação do ecosistema, com foco inicial na floresta amazônica.
Os desafios envolvidos, por outro lado, são enormes [15]. Promover a proteção dos ecossistemas juntamente com o desenvolvimento sustentado dos núcleos populacionais existentes traz questões complexas quando são consideradas as dimensões envolvidas. As florestas abrangem áreas alagadas, de várzea e terra firme, com ciclos de cheia e seca anuais onde o nível das águas pode oscilar em até 15 metros. Altas taxas de umidade e temperatura definem uma condição de operação para os equipamentos. Em algumas áreas, a pressão antrópica agrava o cenário, produzindo na região instabilidades pelo tráfico de animais e de drogas e os constantes conflitos entre populações indígenas e não indígenas. Os limites da Amazônia Ocidental demandam monitoramento constante, para que o Estado possa ter sua presença incontestável sem, contudo, ameaçar a integridade do ecossistema em uma floresta densa e de dimensões compatíveis
com a maioria dos países. Não é por acaso que a Amazônia foi chamada pelos primeiros exploradores de “o inferno verde”.
A presente proposta não apenas endereça vários destes problemas com foco na Amazônia, como também pode ser replicada para outros cenários e regiões, fornecendo uma importante contribuição para a área de preservação ambiental. A proposta congrega uma rede multiinstitucional e multidisciplinar formada por engenheiros, cientistas da computação, biólogos e conservacionistas de universidades, instituições de ciência e tecnologia (ICTs) e uma pequena empresa aeronáutica de base tecnológica:
- A Universidade Federal do Amazonas, sediada em Manaus – Amazonas por intermédio do seu Instituto de Computação – ICOMP/UFAM;
- O Instituto de Desenvolvimento Sustentável Mamirauá – IDSM, unidade de pesquisa vinculada ao Ministério da Ciência, Tecnologia e Inovação (MCTI) localizada em Tefé, região central do Amazonas, que promove pesquisas científicas para a conservação da biodiversidade através de manejo participativo e sustentável dos recursos naturais na Amazônia;
- O Centro de Tecnologia da Informação Renato Archer – CTI, unidade de pesquisa vinculada ao MCTI localizada em Campinas, SP, que atua em tecnologias da informação e suas aplicações;
- A Universidade Estadual de Campinas por intermédio da Faculdade de Engenharia Mecánica – FEM/ UNICAMP;
- O Instituto Tecnológico de Aeronáutica – ITA, por intermédio da Divisão de Ciência da Computação;
- A Omega AeroSystems Ltda., pequena empresa aeronáutica de cunho tecnológico, sediada em Campo Largo – PR, especializada em soluções mais leves que o ar (aeróstatos, dirigíveis e balões de ar quente) de elevado grau de inovação.
O desenvolvimento tecnológico e as aplicações
Em termos de plataformas aeronáuticas mais-leves-que-o-ar, serão desenvolvidos equipamentos tanto fixos (aeróstatos cativos) quanto móveis (dirigíveis robóticos). Esses equipamentos constituirão plataformas para sensoriamento remoto e comunicação, destinadas a suportar as aplicações pretendidas. No caso específico dos dirigíveis, soma-se o desenvolvimento de estratégias de controle e navegação para uma plataforma inovadora composta de quatro propulsores elétricos e superfícies aerodinámicas de atuação.
Em suma, esta proposta objetiva desenvolver um conjunto de soluções tecnológicas que atendam aos seguintes propósitos:
1. Prover um sistema de sensoriamento remoto e de monitoramento ambiental. Além das aplicações relacionadas com a aquisição de dados para o melhor conhecimento do ecossistema amazônico, os sistemas de monitoramento definirão barreiras sensoriais virtuais contra desmatamento, com aplicações imediatas na implantação de estradas, hidrelétricas, e outras grandes obras, na inspeção de gás/oleodutos, linhas de transmissão, plantas industriais poluentes, diques e lagos, áreas de mineração, dentre muitas outras. Incidentes poderão ser detectados antes de se tornarem um desastre ambiental. Também no monitoramento de áreas urbanas e propriedades rurais, onde a ocupação humana sempre tende a se expandir, permitindo a tomada de ações preventivas. Além dos equipamentos de aquisição sensorial em campo, propriamente ditos, o grupo estará atuando no desenvolvimento de sistemas de comunicação para disponibilização da informação adquirida.
2. Levar serviços de telecomunicações às regiões remotas e aos pequenos núcleos populacionais distribuídos na região. Os desafios relacionados com as distâncias, as dificuldades de propagação na selva ou mesmo sobre as copas demandam estudos aprofundados e específicos para a questão. Este grupo se propõe estudar o assunto, provendo soluções que garantam uma qualidade de serviço adequada para a região.
3. Promover soluções tecnológicas para que as populações ribeirinhas e os núcleos populacionais remotos possam desenvolver-se, com qualidade de vida, levando oportunidades que sejam ao mesmo tempo economicamente viáveis e que promovam a utilização racional dos recursos naturais.
4. Por último, mas não menos importante, acrescenta-se a perspectiva de geração de spin-offs para a produção de componentes tecnológicos que possam constituir-se em produtos. Essas iniciativas poderão ser suportadas pela recém-inaugurada (Incubadora de Base Tecnológica) do Núcleo de Inovações Tecnológicas Sustentáveis (NITS) do Instituto Mamirauá. Amazônia Legal possui projetos de desenvolvimento de infraestrutura de grande porte que, naturalmente, produzirão um alto impacto ambiental. A maior problemática por trás destes projetos são os altos riscos de se tornarem agentes de desenvolvimento desordenado, multiplicando as ações de agressão ao bioma e estendendo o impacto ambiental muito além do previsto para a obra. Os sistemas que serão desenvolvidos poderão ser utilizados para definir um sistema de gestão de risco, e políticas de preservação e contenção de impactos no caso de incidentes ou desastres ambientais.
Para suportar essas aplicações, a pesquisa e desenvolvimento de soluções tecnológicas abrangem:
1. O estabelecimento de um grupo multidisciplinar para o desenvolvimento das aplicações ambientais pretendidas. Este grupo contará com especialistas: i) do IDSM (nomeadamente do Grupo de Pesquisa em Ecologia de Vertebrados Terrestres, Grupo de Pesquisa em Mamíferos Aquáticos Amazônicos, Grupo de Pesquisa em Inovação, Desenvolvimento e Adaptação de Tecnologias Sustentáveis, Coordenação de Monitoramento Integrado do Instituto Mamirauá, Coordenação de TIC, e Núcleo de Inovação e Tecnologias Sustentáveis); ii) das universidades (UFAM, UNICAMP e ITA) e do CTI – que atuam nos diversos campos da robótica, comunicação, sistemas sensoriais, processamento da informação e; iii) da empresa Omega AeroSystems no que tange os dirigíveis, aeróstatos e seus sistemas.
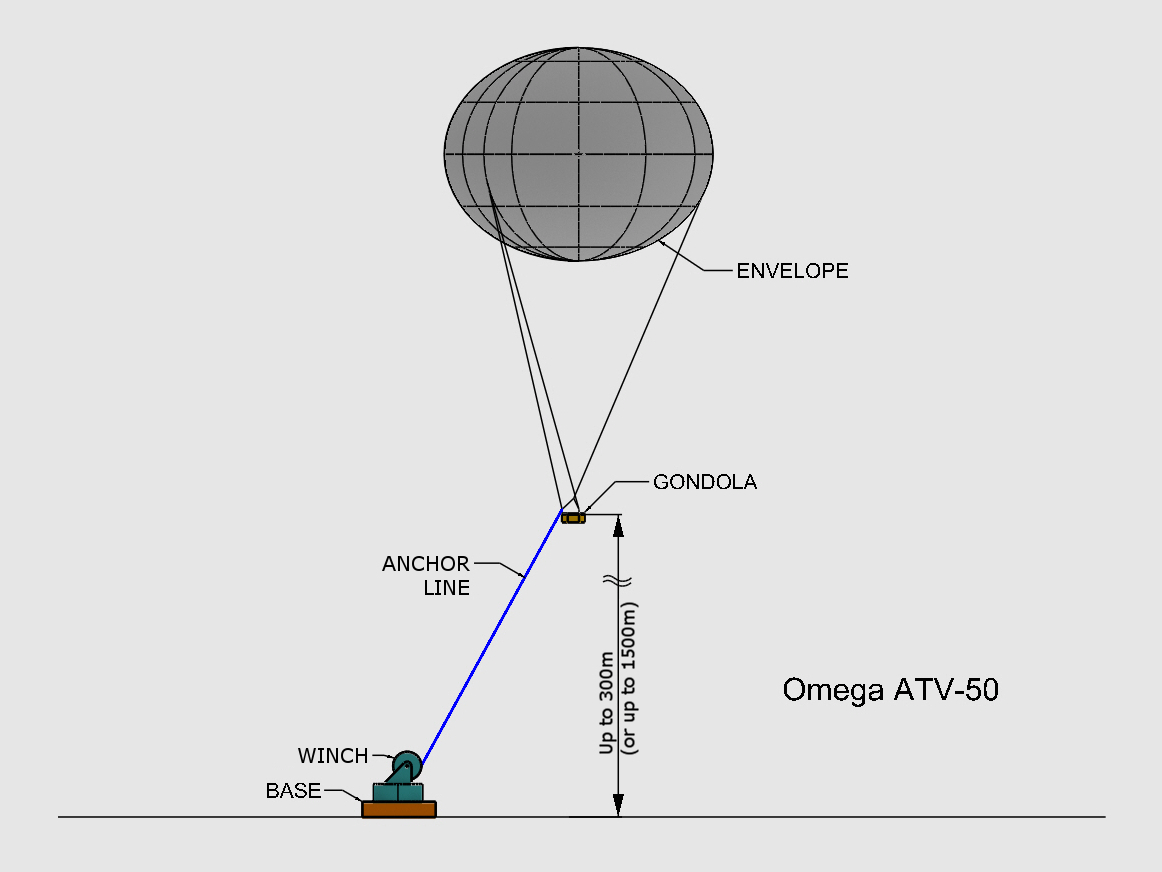
2. A implantação de aeróstatos cativos (Fig. 4a), envolvendo a concepção, construção e integração de todos os subsistemas e aplicações (ver Seção 10), incluindo: i) o envelope de gás; ii) a gôndola; iii) a infraestrutura de operação (cabos de lançamento, de energia e de comunicação, guincho, etc.) ; iv); a integração, no aeróstato, dos sistemas de comunicação e sensoriais; v) a validação experimental de um conjunto de aeróstatos pela realização de aplicação no contexto sócio-econômico e ambiental da Amazônia.
3. A entrega de um Dirigível robótico (Fig. 4b), abordando (ver Seção 10): i) o projeto e construção de uma nova concepção de dirigível não tripulado, com quatro propulsores elétricos vetorizáveis; ii) a concepção e construção da infraestrutura robótica associada à aeronave (sensores e processadores e interfaces embarcados, sistema de comunicação e estação de operação em terra); iii) os desenvolvimentos em modelagem, simulação e controle/navegação desta nova modalidade de aeronave e, finalmente, iv) a validação experimental e realização de aplicação no contexto sócio-econômico e ambiental da Amazônia. A nova configuração com quatro propulsores elétricos vetorizáveis, acrescidas das convencionais superfícies aerodinámicas de atuação na cauda, visam aumentar o grau de manobrabilidade da aeronave. Junta-se a isso aspecto de controle, estendendo-se das fases de aterrissagem e decolagem verticais bem como de voo pairado em ponto de interesse, até a fase conhecida como voo aerodinâmico (à frente). Sistemas de controle que cubram essas duas fases e a transição entre elas, permanecem como desafios abertos na comunidade científica.
4. A concepção e estabelecimento das diversas soluções de comunicação necessárias às diferentes aplicações, considerando parámetros como tipo e banda de dados, coberturas dos enlaces de comunicação, operação em ambiente de floresta, peso e consumo adequados, etc.
5. O desenvolvimento de técnicas e ferramentas destinadas à navegação robótica autônoma [22, 54, 75, 67] e à exploração dos conjuntos de dados adquiridos, aplicando técnicas de reconhecimento de padrões, processamento digital de sinais e de imagens, fusão sensorial multimodal, dentre outras.
 |
 |
| (a) Aerostato Omega ATV-50. | (b) Dirigível não tripulado. |
| Figura 4: Plataformas aéreas mais leves que o ar da Omega AeroSystems para segurança, monitoramento ambiental e telecomunicações. | |
É importante salientar que os componentes tecnológicos propostos são baseados na experiência prévia do grupo, envolvendo cooperações internacionais com: Instituto de Engenharia Mecânica – Instituto Superior Técnico de Lisboa e Instituto de Sistemas e Robótica – Universidade de Coimbra – Portugal [6, 5, 58, 23, 22, 55, 58]; Institut National de Recherche en Informatique et en Automatique, Sophia Antipolis, Institut des Systèmes Intelligents et de Robotique – Université Pierre et Marie Curie e Heuristique et Diagnostic des Systèmes Complexes – Université de Technologie de Compiègne – França [78, 79, 76, 77].
[Clique aqui para acesso às Referências Bibliográficas citadas no texto]